
Tests du catamaran
Tests avec le Catamaran avant le départ en mission à Nice
Nous sommes bientôt sur le départ 🎒 pour la mission à Nice 🌊 qui aura lieu cette année fin septembre. Alors pour finaliser les préparations, on profite de notre zone de test pour vérifier que tout va bien 🛠️.
Le confinement a retardé nos travaux sur les robots, donc nous n’avons pas toutes les fonctionnalités que nous avions prévues. Mais parmi les nouveautés, nous avons maintenant la version stabilisée de notre nouvelle carte-mère qui accueille l’ESP32 et qui vient remplacer la plaque à bidouille qui avait permis de tester le proof of concept. Elle a été principalement réalisée par deux de nos étudiants : Charles Villard et Raphaël Tréglia.



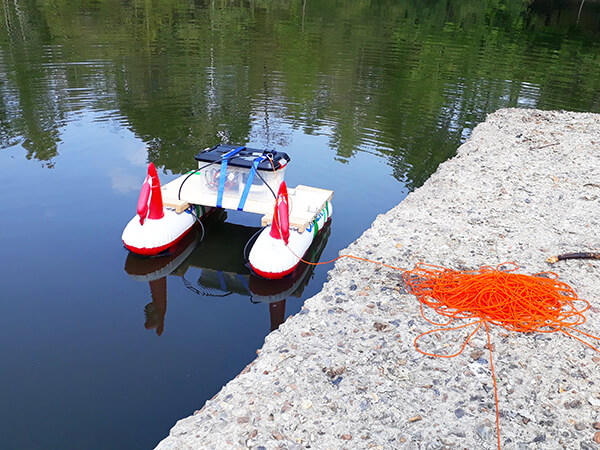
De retour sur la plateforme de test avec Charles 👌🚀 !
Nous testons la portée avec notre nouvelle radio : on peut maintenant aller jusqu’au bout du lac (une centaine de mètres) sans avoir les instabilités de connexions rencontrées lors des précédents tests. Nous essayons aussi le contrôle 🎮 via un smartphone 📱, car pour les tests en mer, une partie seront réalisés à bord d’un kayak 🚣, donc dans ces conditions, on oublie l’ordinateur… 💻 x 🌊 = 😱


Pilotage via la station sol qui tourne sur smartphone et tests de portée
(🧐 yup le petit point tout au bout du lac derrière la bouée, c’est le cata 😄 !)
Et avec notre nouveau GPS qui nous permet d’atteindre une précision à moins de 50 cm 📍 nous pouvons tester le suivi automatique de trajectoires. Il y a encore du réglage à faire, mais les premiers résultats sont pas mal 👍! En relançant plusieurs fois de suite la même trajectoires, on obtient des tracés assez proches 🙂.
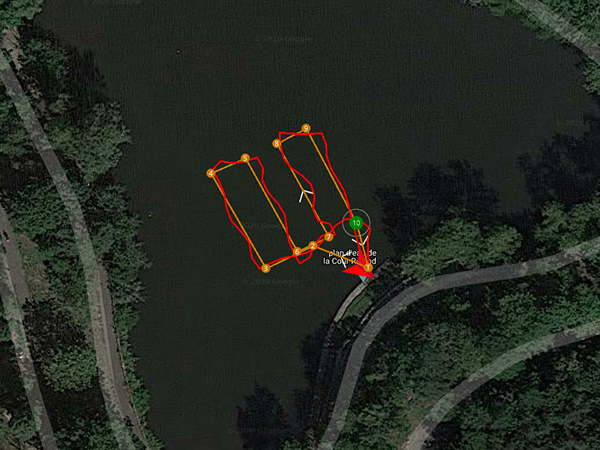

Exemples de tests de réalisations de trajectoires automatiques
On a aussi terminé les racks internes du banc caméras 📷 et rajouté des interrupteurs 🛑 (enfin ✨💃🕺✨ !!!). Raphaël a travaillé sur le programme d’acquisitions synchronisées et vient d’ajouter une fonctionnalité qui permet de relier les images aux coordonnées GPS qui sera très utile par la suite pour l’exploitation des jeux de données.
Petit aperçu en vidéo de la conception du banc caméras
Mais le jour du test, un orage ⛈️ est arrivé et ne nous a pas permis de vérifier cette partie. Ce sont les aléas du terrain : le temps est écoulé, ça sera à faire directement en mission !


Test (tentative) de la synchronisation des images et des coordonnées GPS avec Raphaël
⇨ Voir : la mission à Nice 2020
⇨ Voir : le post suivant sur les tests du catamaran à Jouy-en-Josas
⇦ Revoir : la mission à Nice 2019
⇦ Revoir : le post précédent sur les tests du catamaran à Jouy-en-Josas
