
Mission Nice 2020 ♯01
Premier jour de mission à Nice
Nous voilà repartis pour Nice avec Kraken, notre catamaran, pour une nouvelle mission de tests en mer. Cette année, on fait le trajet en voiture 🚙 plutôt qu’en train 🚅, et comme on a encore un peu plus de matériel que l’année dernière à transporter, ce choix s’est avéré fort avisé malgré les 10-12h de transit 😅!

On était à 100 Kg 💪 par le train, là… 🙄 on a renoncé à peser… 😜
Les objectifs de cette mission sont d’une part de voir si les changements effectués sur le robot depuis l’année dernière sont validés sur nos zones de tests marines et d’autre part pouvoir rapporter des couples d’images synchronisées 📷 d’un fond équipé (mires pour former les points de contrôle + réseau de mesures 📐 pour avoir la vérité terrain), géolocalisés 📍 et acquis sur trajectoires automatiques ➿.
On a décalé notre départ d’une semaine en dernière minute 😖 car les prévisions météorologiques à moins de trois jours annonçaient de la pluie en continu 🌧️ sur toute la semaine dernière et beaucoup de vent 💨 (finalement ça n’a pas été aussi terrible qu’annoncé 😩 mais on ne pouvait pas prendre le risque 😓).
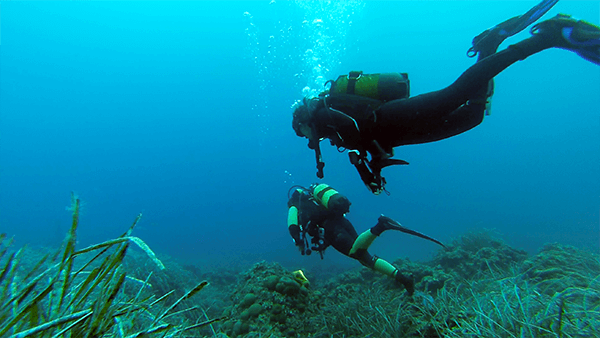
Après l’installation et la préparation du matériel, on passe louer les blocs puis direction le Cap d’Antibe pour effectuer la plongée de réadaptation 👨🚀 On profite de ce temps nécessaire d’un point de vue sécurité pour tester, en plus du matériel de plongée, tout le matériel d’acquisition, mais aussi pour explorer de nouveaux fonds 🤠 qui deviendront peut-être des futures zones d’expérimentation.
🧐 L’expérience l’a montré à maintes reprises : il est important que nous ayons des plans de replis en fonction de la météo 🌤️.


Parrés à plonger 👌 Woahh 😮 ça existe une mer calme pour entrer dans l’eau ? On n’est pas habitués 😛!
Nous partons de la plage de la Pointe Ouest pour une heure et demi ⏱️ de plongée. Les nuages couvrent un peu le ciel ⛅ ce qui réduit la visibilité sous l’eau, mais la mer est plutôt calme.
👎 C’est parti ! 😁🤙
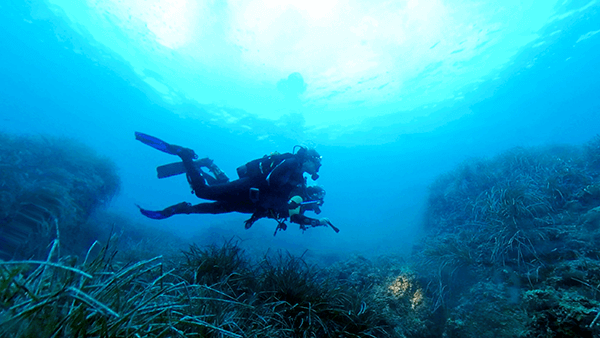
Le matériel fonctionne bien, les nouveaux pieds téléscopiques sont pratiques, la nouvelle version du banc PiCam a le comportement attendu et il n’y a plus de buée sur la caméra à 360° 👌 La diversité des fonds nous permet de prendre des vidéos 🎞️ que nous pourrons utiliser pour tester des algorithmes ou pour des projets pédagogiques.
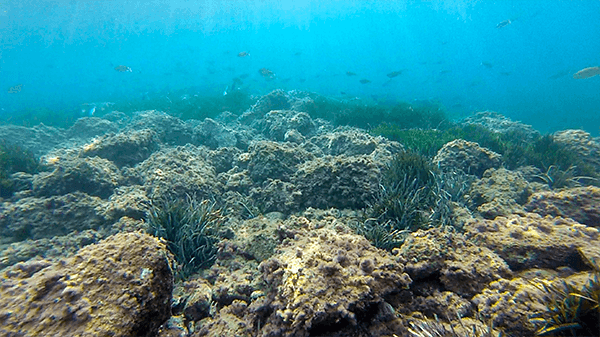
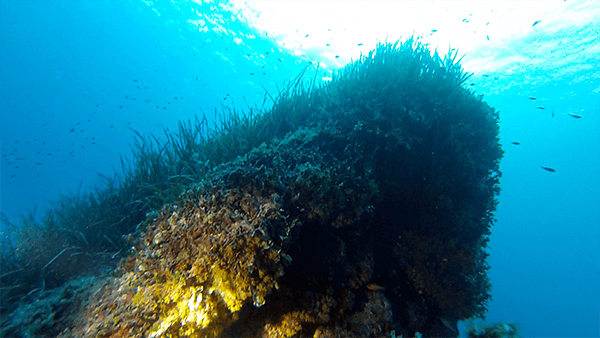
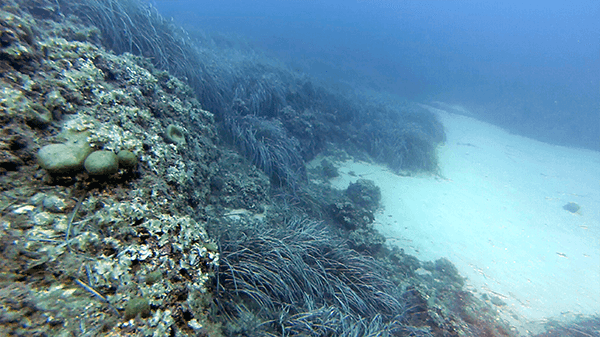
Exemples de fonds au-dessus desquels on a enregistré des vidéos 🎥 de survols pour tester la détection d’amers par exemple pour des algorithmes de navigation
On n’oublie pas les petits prélèvements (photographiques 📸) de faune 🐠 et flore 🌱 pour les observatoires de la biodiversité 🌎.
Au cours de la plongée, en plus des habituels castagnoles, sars, saupes, mérous, méduses, serrans, girelles, apogons et rascasses, on a croisé une bébé murène (Muraena helena), des dorades royales (Sparus aurata), un oursin granuleux (Sphaerechinus granularis), une jolie seiche (Sepia officinalis) dansante et un poisson lézard (Synodus saurus) qui a surgit hors de son camouflage ensablé.


Une jolie seiche qui s’éloigne prudement en marche arrière et un petit poisson lézard qui s’est désablé
Fin de plongée (même pas froid 😬) : humains et matériels sont prêts pour les tests du lendemain 👌! Retour au camp de base.
⇨ Lire la suite : Mission Nice 2020 ♯02
⇦ Revivre : la mission de Nice 2019
