Mission Nice 2020 ♯02
Deuxième jour de mission à Nice
Aujourd’hui, le temps est parfait 🔆 et la mer est relativement calme, c’est l’idéal pour faire des tests 😀 alors que les conditions vont se dégrader en fin de semaine 🌦️🌊😖. Mais (et oui, il y a toujours un “mais” qui vient perturber le programme) nous avons appris 2 jours avant le départ en mission que la session virtuelle de la conférence IGARSS 🎓 se tiendrait ce jour-ci, en plein milieu de la journée… 🤦😞
Partout dans le monde, à cause de la crise sanitaire, les conférences scientifiques sont passées en distanciel 💻 ou ont été décalées d’un an 📆 quand cela était possible. L’IGARSS 2020 aurait dû avoir lieu au mois de juillet à Hawaii 🌋🏝️, elle a finalement été reprogrammée en visio pendant notre semaine de mission.
Donc exit la grosse manip pour aujourd’hui 😣, on ne pourra sauvegarder que quelques petits slots de tests. 🤔 Pour gagner du temps ⏳ nous prenons le risque de participer à la conférence directement depuis le terrain grâce à notre nouveau modem portable. Comme ça nous serons déjà sur la zone d’expérimentation quand les sessions seront terminées 👌.
On prépare donc tout le matériel, puis direction le Cap de Nice.
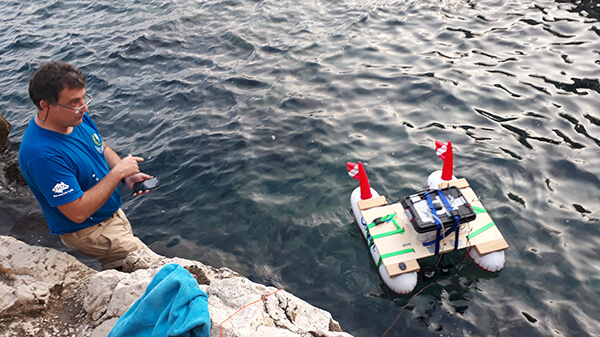
On s’installe le long du Sentier du Littoral : ouf la connexion passe 📡! Et elle est suffisante pour deux flux vidéos 👨💻👩💻 car nous intervenons en parallèle sur deux sessions pour présenter nos trois articles 📃. La conférence IGARSS (IEEE International Geoscience and Remote Sensing Symposium) est l’un des plus gros rendez-vous mondial de la communauté scientifique dans les domaines des géosciences et de la télédétection.
Ça représente une semaine entière de conférences réparties en des dizaines de sessions organisées en parallèle chaque jour, présentées et suivies par des milliers de scientifiques venus des quatres coins du globe 😮


L’équipe SEAL connectée avec la planète 🌍 depuis le terrain 👌
On en profite pour faire rêver un peu nos collègues scientifiques du monde entier avec un petit panorama 🖼️ : ok, on n’est pas à Hawaii, mais au moins on a la mer et le soleil brille 🏖️ (comment ça, on se venge 😈 ?)!
Nos micros 🎤 gèrent le bruit du vent 💨 et des vagues 🌊 pour que ça ne couvre pas nos voix. On valide donc au passage la capacité technique à faire du live terrain, ça nous sera utile pour plus tard 😏😎!
Nos articles portent sur 20 ans d’expériences en undergraduate research, sur une méthode d’équipement d’un chantier sous-marin par un réseau de mires optimisées pour être efficacement détectées par intelligence artificielle et sur le développement d’un outil temps réel pour l’étalonnage de caméras sous-marines à l’aide de l’intelligence artificielle.
La conférence suit son cours, on présente nos papiers 📃, on répond aux questions 💬 et on écoute les présentations de nos collègues 👀.
Mais la session a pris du retard 😥 à cause de problèmes techniques 🛠️. Alors pour ne pas perdre trop de temps, 🤔 vu qu’on est coincé là jusqu’à la fin de la conférence, on décide de tourner 🎬 les rushs que l’on avait prévus pour réaliser une vidéo 🎞️ de présentation de notre équipe.
Un smartphone, un pied et un micro-cravatte, révisions des textes à la volée, un peu d’improvisation sur les cadrages, 2 à 5 prises par séquences et hop l’affaire est dans le sac 👜 (enfin, dans la SD…) !
Voici le résultat après montage 🕶️ :
L'équipe SEAL en 2'8'' top chrono !!!



On a récolté au passage quelques séquences bêtisier, que nous allons pour l’instant classifier top secret…
La conférence touche à sa fin : 👋🌏 bye bye the world! Heureusement, car les batteries 🔋 de l’ordinateur 💻 étaient elles-aussi sur leur fin (on a de quoi recharger les téléphones sur le terrain, mais on n’est pas encore équipés pour les ordinateurs…). On se rédéploie sur notre plateforme de test habituelle qui est à deux pas 👣.
🏃🏃 Vite, vite, les nuages 🌤️ ont subrepticement colonisés le ciel et la luminosité 💡 a suffisament baissé pour que sous l’eau on ait l’impression d’être beaucoup plus profond qu’en réalité…


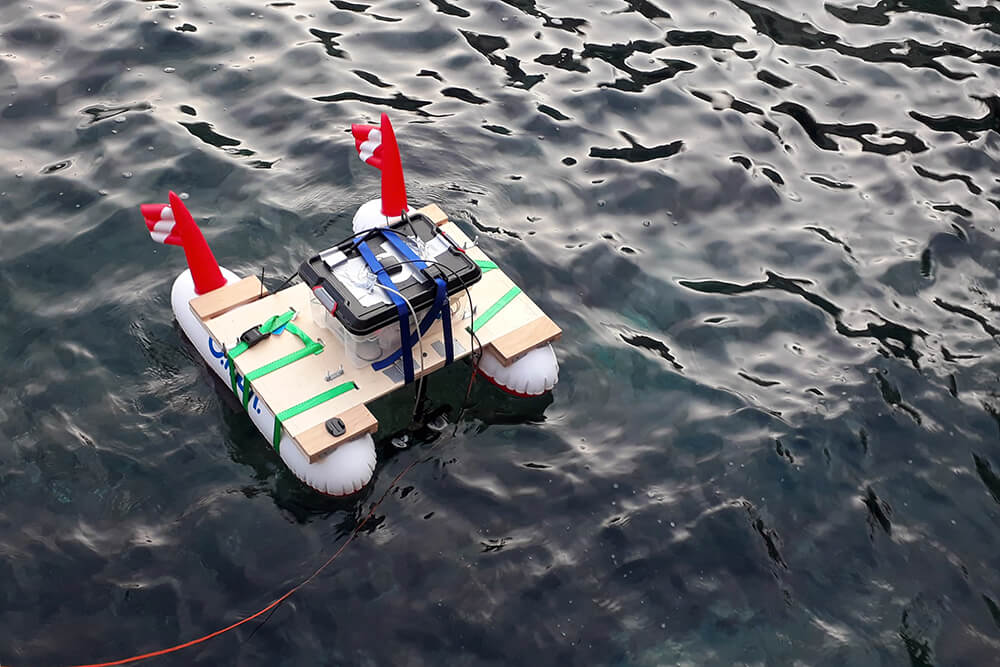
Installation du matériel sur la plateforme de test et mise à l’eau de Kraken 🦑
Ça ne donnera pas grand chose pour les images 🌌 en elles-mêmes mais on peut au moins tester les trajectoires et le fonctionnement des prises de vues avec timestamp GPS.

C’est parti pour les tests !
On poursuit les tests jusqu’à la nuit 🔦👻, les trajectoires se passent globalement bien, mais parfois le robot a dû mal à rejoindre le premier point et part à l’opposé 🤨 (en direction des rochers évidement 😱) sans que l’on arrive à comprendre pourquoi.
Il est difficile de modifier les trajectoires sur le téléphone : le niveau de zoom n’est pas le même que sur PC (lié à la taille de l’écran) et donc la taille de la zone totale est plus petite que la taille du doigt… Impossible de sélectionner et déplacer les waypoints…
On profite de la session pour faire des réglages de vitesse et des ajustements sur le suivi de trajectoires. On utilise un plongeur 🏊 de sécurité, car la gestion du câble de sécurité depuis la plateforme n’est pas simple.



Ça devient une habitude de finir de nuit 🌔, on dirait presque qu’on aime ça 🐺😋
De retour au camp de base, on a pu vérifier que les images étaient bien prises correctement avec leur coordonnées GPS et qu’elles étaient nettes. Sauf que, comme anticipé, elles ne seront pas utilisables car il n’y avait vraiment pas assez de lumière (si, si, en plissant les yeux 🔍👀 on voit quelques détails… 😅)!
⇨ Lire la suite : Mission Nice 2020 ♯03
⇦ Voir le post précédent : Mission Nice 2020 ♯01
