
Publication Calib in-situ
Publication sur le guidage de l’acquisition de vue d’étalonnage in situ
L’équipe SEAL est fière 🤗 de vous annoncer ✨ la publication de son article :
"Automatically Guided Selection of a Set of Underwater Calibration Images", Loïca Avanthey, Laurent Beaudoin, Corentin Bunel et Charles Villard dans Journal of Marine Science and Engineering (MDPI) [Q2/Q1], 10(6), 741, 2022 (DOI).
Cet article 📃 a pu voir le jour grâce aux expérimentation terrain menées lors des dernières missions à Nice et pendant le colloque Submeeting à Saint-Raphaël.
Il propose une méthodologie permettant de sélectionner automatiquement un set d’images de pré-calibration tout en guidant l’opérateur en temps réel sur le type de données manquantes.
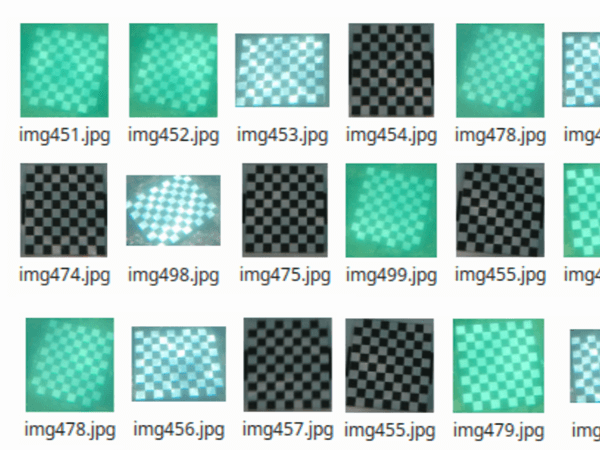
Pour ce faire, il est nécessaire de pouvoir rapidement localiser le damier de calibration (et surtout ses points d’intersections) sur l’image acquise, même si les conditions d’acquisitions ne sont pas idéales (absorption, éclairage non homogène, etc.). En fonction du matériel hardware à disposition (CPU, GPU), on propose donc plusieurs stratégies qui vont du traitement d’image classique aux méthodes de deep learning.
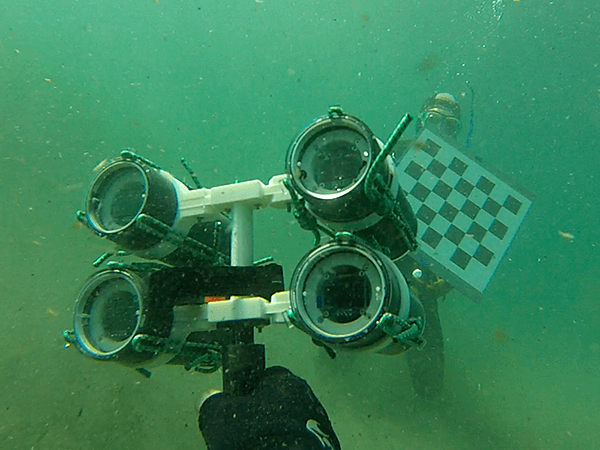
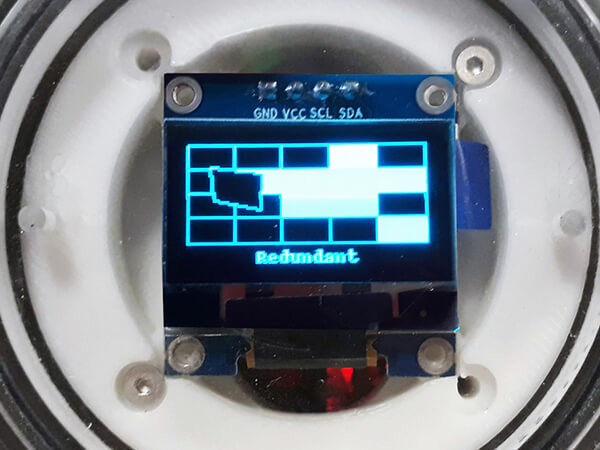
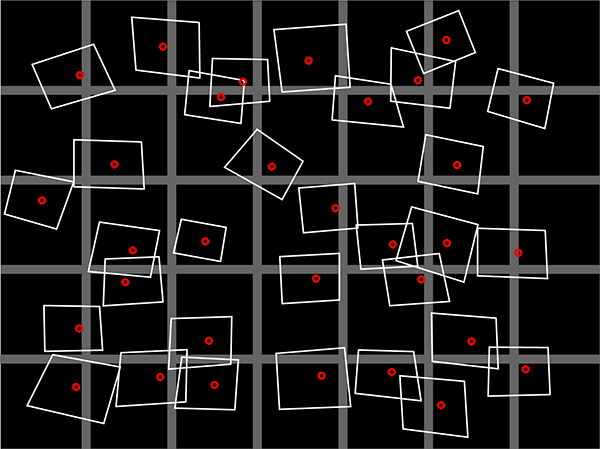
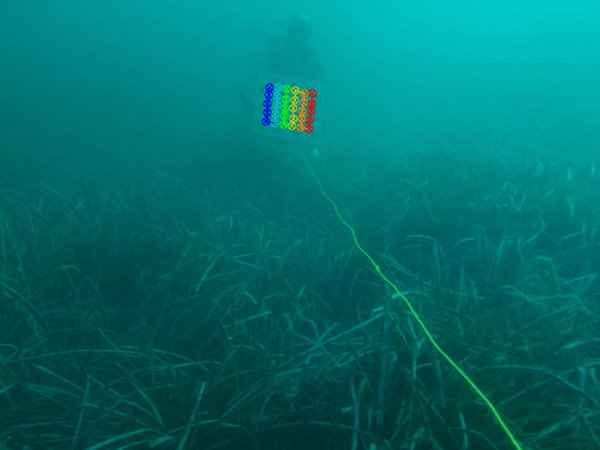
Acquistion in-situ avec retour écran pour guider l’opérateur et exemple d’une grille de sélection finale
Charles (doctorant) et Corentin (étudiant labo) ont contribué à ces travaux en travaillant sur une partie des programmes utilisés dans cette étude : la détection du damier et de ses intersections avec le réseau de neurones YOLO (You Only Look Once).

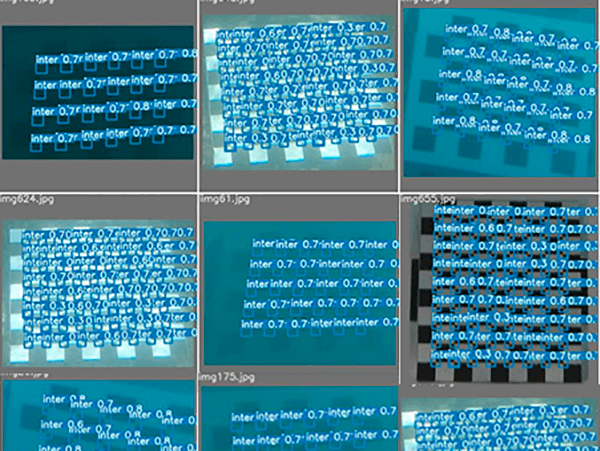
Détection du damier avec YOLO pour faire un focus d’attention, détection des intersections avec YOLO, résultat des intersections détectées (de manière classique ou via YOLO) et ordonnées
Bonne lecture 👀 !
⇨ Voir la publication suivante : EIT 2022 - Outils pédagogiques
⇦ Voir la publication précédente : Remote Sensing 2022 - Serious Game Robotique
