
Mission Nice 2019 ♯03
Troisième jour de mission à Nice
Dernier jour de mission ce jeudi. Comme on l’a anticipé, l’état de la mer reste inchangé. On n’emporte donc que les capteurs sous-marins, le robot, lui, reste au camp de base. Deux plongées de prévues au programme : la première a pour objectif principal de refaire une séquence d’étalonnage puis s’il reste du temps (de l’air) tester la qualité des prises de vues plus en profondeur si la visibilité n’est pas trop mauvaise, la seconde plongée se concentrera sur l’équipement d’une zone.


Voici le lieu de plongée de ce matin. Ça parait calme hein 🙄🌴? Parés à plonger 👌👎!
La houle de fond est toujours aussi puissante ! On passera sur les conditions de mise à l’eau, le tout étant de ne pas s’ettoufer de rire dans le détendeur devant le comique de la situation… 🤣
La zone est un tombant, d’abord progressif puis à ça descend à pic. Les conditions de visibilité ne sont pas trop mal, les acquisitions du matin devraient donner quelque chose ! On s’installe à 6-8 mètres de profondeur, un peu en mode dahu dans la pente, pour réaliser les prises de vue d’étalonnage à plusieurs distances du damier.


On est encore dans un herbier de posidonnies, mais la configuration de la pente fait que les poissons 🐟passent un peu moins fréquemment devant le damier
Après ces acquisitions, on continue à descendre le long du tombant. La partie à pic est creusée de multiples cavités et grottes sous-marines dont les paroies sont tapissées de corail. C’est parfait pour faire nos tests de qualité d’acquisition 📷 En effet, il est prévu que notre banc caméra soit utilisé courant juin pour une mission profonde sur l’étude des coraux !


Le long du tombant et à l’entrée d’une grotte 😮
Sur le rendu des images dans des conditions d’éclairage artificiel non homogène 🔦 avec particules en suspension, c’est pas trop mal.
Mais il y a encore des réglages à faire, car il y a beaucoup (trop) d’images floues ! Et le robot, même s’il peut aller doucement, sera quand même en déplacement…


Exemple de rendu des images : une image nette et un joli flou artistique 🧐


Fin de la plongée du matin 😉👍
Pour la deuxième plongée, on change de lieu, car pour tester l’équipement de zone, on va éviter le tombant qui est un cas très particulier. Blocs regonflés, estomacs remplis : c’est reparti !
Par contre les nuages ont envahi le ciel ☁️ ce qui va nous priver de l’essentiel de la luminosité sous l’eau, les prises de vue ne vont pas donner grand chose 🙁 C’est donc surtout la procédure et la manipulation que l’on va tester.
On explore rapidement les alentours pour trouver un espace avec un peu de relief sans trop s’éloigner de notre point de départ. Les fonds sont peu profonds (< 4 m), il va falloir faire avec les remous de surface. On sélectionne une zone avec quelques rochers qui fera l’affaire pour le test et on procède à l’équipement.



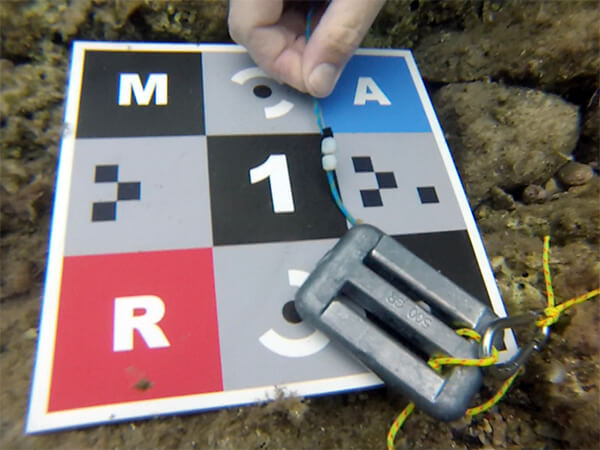
Installation des mires, mesure de leur profondeur et des distances entre les mires (3 mesures par mires)
Toutes ces mesures forment ce qu’on appelle la vérité terrain, on pourra ensuite les comparer aux mesures réalisés sur les produits finis après le traitement des images (mosaïques, reconstructions 3D) pour estimer leur précision et leur fiabilité 🧐
Il y a encore quelques points à améliorer pour accélérer la procédure, mais le résultat est pas mal 😎 On a réalisé la phase d’acquistion avant la phase de mesure pour profiter un maximum de la luminosité qui baisse à vue d’œil 😏


Campagne d’acquisition sur la zone équipée des mires
Fin de la deuxième plongée et donc fin de cette mission à Nice 😭: on remballe dans la nuit à la lueur du lampadaire 🌙 La journée n’est pas terminée 😴: il faut encore tout repacker pour le train de demain.
Et le test de la caméra 360° dans tout ça ? Et bah c’est pas mal du tout, à part un problème de buée qui arrive au bout d’un peu plus de 30 min qu’il faudra qu’on règle, on est plutôt content. Jugez vous-même 😎
⇦ Voir le post précédent : Mission Nice 2019 ♯02
⇨ Voir la : Mission à Nice 2020
