
Un servo pour Car
Ajout d’un servo-moteur pour la direction de la voiture pédagogique
Le cours de Télédétection s’est terminé, on y a abordé dans le dernier volet la partie pratique sur le vecteur avec la voiture pédagogique 🚙 (dans le scénario de l’évaluation, c’est un rover qui explore des zones sur Mars 😉). Pour l’instant, pas de capteur, juste de la navigation à l’aveugle. C’est après le cours de Vision par Ordinateur qu’on rajoute une caméra.
À l’origine, le vecteur utilisé pour ces deux cours est un jouet radiocommandé 🎮 que nous avons transformé en plateforme d’apprentissage. Nous n’avons conservé que la mécanique et nous avons ajouté des cartes électroniques Arduino / Raspberry Pi pour le contrôle-commande sur une coque fait maison qui permet de les accueillir.
Un des problèmes majeurs de cette plateforme, c’est la fragilité du système de direction.
En effet, comme souvent sur des modèles réduits de cette taille, la direction est contrôlée par un moteur à courant continu avec un jeu d’engrenages plutôt que par un servo-moteur. Or sur ce modèle, le plastique utilisé pour les engrenages est plutôt tendre. Et il a tendance a beaucoup souffrir quand il est martyrisé par des groupes d’étudiants enthousiastes désireux de tester la téléportation.
“Et si on passait de -150 à 150 d’un coup, ça irait plus vite non ?” 😇😙 Et paf l’engrenage… ⚙️
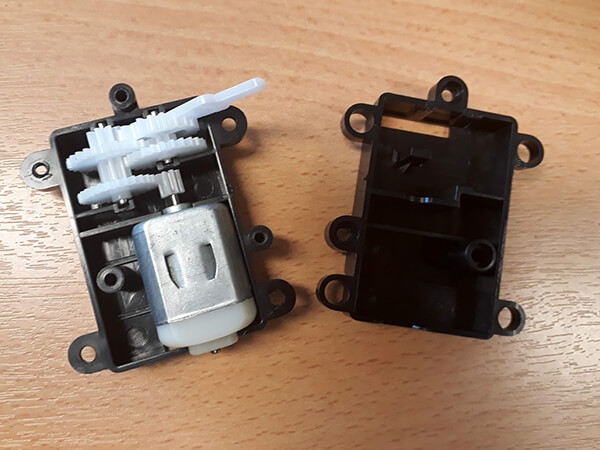
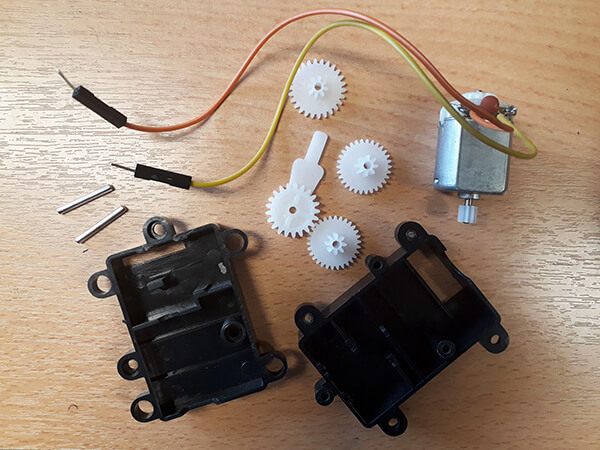
Dans la structure actuelle : un moteur à courant continu avec un jeu d’engrenages
D’autant que l’on utilise des piles plus puissantes que sur le modèle original (comme on rajoute pas mal de chose sur la voiture, il faut bien qu’elle ait assez de puissance pour déplacer tout ce poids). Alors le blocage du moteur quand il arrive en butée est d’autant plus violent. On se retrouve donc généralement rapidement avec des engrenages tout limés 😵🥺 malgré les gros avertissements indiqués en rouge sur le sujet et répétés à l’oral lors de la remise du matériel 😬 (“promis maintenant on va faire les étapes intermédiaires comme vous nous l’aviez demandé !” 😡).
Sauf que les pièces détachées ne courrent pas les rues, et on ne va pas racheter des voitures entières pour changer uniquement le bloc de direction : il est temps de trouver une solution !
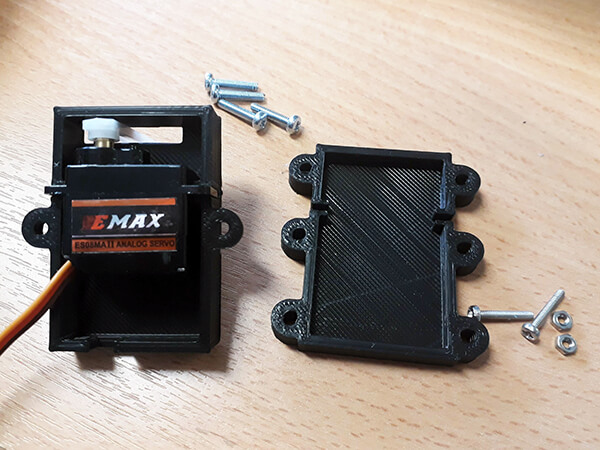
Et la solution, c’est de mettre un servo-moteur, un vrai. Car la voiture entièrement réalisée maison, ce n’est pas pour tout de suite (sachant que ce travail est déjà engagé sur l’araignée, chaque chose en son temps !). On a vérifié que les dimensions 📏 nécessaires à l’intégration d’un servo-moteur étaient compatibles avec la configuration actuelle et Alice et Jessica, étudiantes au labo, ont codé un premier modèle 3D du boîtier de direction permettant d’accueillir un servo-moteur.
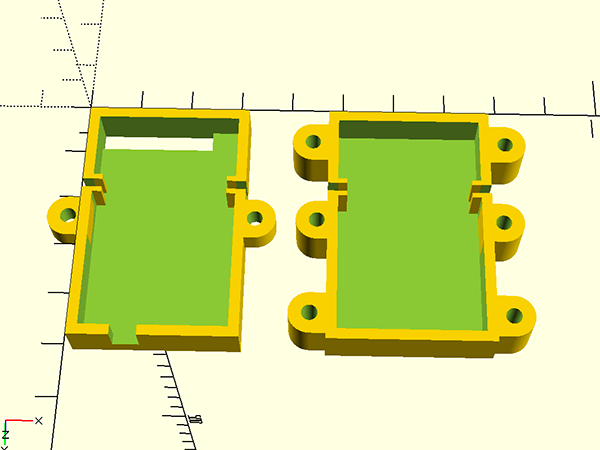
Modélisation d’un nouveau boîtier pour accueillir le servo-moteur et impression 3D
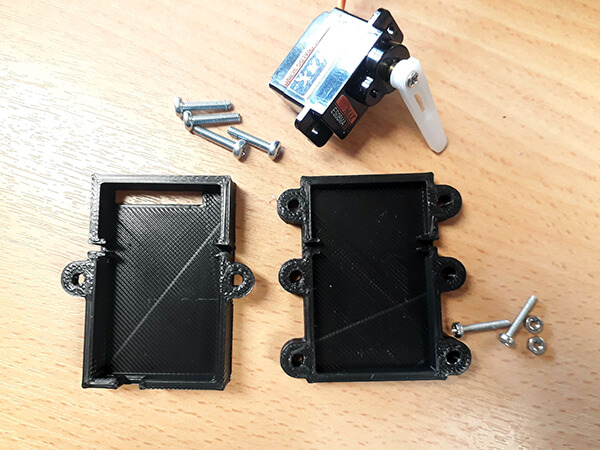
Nous avons apportés des modifications au modèle jusqu’à arriver à une solution satisfaisante. Et nous avons pu réaliser les premiers tests : ça fonctionne, yes 🥳! Maintenant il ne reste plus qu’à faire tourner les imprimantes 3D pour dupliquer les boîtiers comme des petits pains, à procéder à leur installation sur les plateformes (oui… il faut tout démonter 🛠 et modifier les receptacles de piles au passage pour que ça fonctionne) puis mettre tout ça à l’épreuve des godzitudiants 🦖 (qui a dit qu’ils ont réussi à nous cramer 5 cartes Arduino Uno en moins de 48h cette année ??? 😭). On espère que tout sera prêt pour le prochain cours de Vision par Ordinateur !
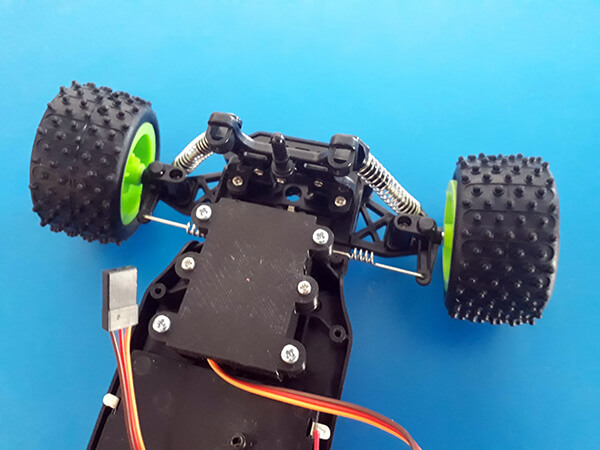
Assemblage et montage du nouveau boîtier de direction sur la voiture
Ça roule ! Enfin… ça dirige 😜
