
Évaluation Télédétection 2021
Evaluation TELE 2021
Le cours Télédétection (“voir à distance” 🔭) touche à sa fin. On y a introduit un grand domaine de la robotique : les plateformes robotisées mobiles utilisées pour collecter des données de leur environnement d’évolution.
Nous sommes remontés à l’origine de la naissance de ces vecteurs ✈️, de ces capteurs 📸 et de cette discipline 🎓 pour mieux comprendre le panorama actuel et la manière dont sont arrivés les innovations 💡 passées afin de pouvoir anticiper 💭 celles du futur. Nous avons ensuite abordés les différents domaines d’évolutions, accompagnés de leurs spécificités et de leurs applications pour bien comprendre leurs enjeux : télédétection spatiale, aérienne & rapprochée (basse altitude & sous-marine).
Concernant le volet télédétection basse altitude, nous avons dû annuler l’atelier pilotage de drone à cause de la crise sanitaire, mais nous avons pu maintenir en distanciel celui sur la réglementation.
Puis nous avons achevé la séquence de cours sur notre serious game, le SEAL Haggle robotique, organisé en deux sessions pour respecter les jauges. Il permet notamment de découvrir les éléments systèmes d’un robot et comprendre comment ils interagissent. Au passage, un grand bravo aux vainqueurs respectifs de ces deux sessions : l’Elit Bot & le Pas du Tout.
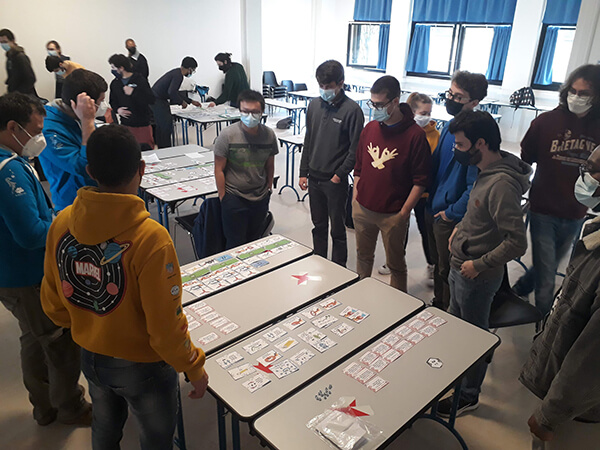


Haggle robotique, session 1 & 2 !
Enfin, on termine par l’évaluation, qui, comme à notre habitude, est une épreuve pratique permettant de mettre en application ce qu’on a vu dans le cours. Elle est basée sur la plateforme pédagogique 🚙 que nous avons développée à partir d’une voiture radiocommandée. Les étudiants ont dû assembler les éléments systèmes 🛠 et commander les moteurs ⚙️ pour prendre le contrôle de la voiture.

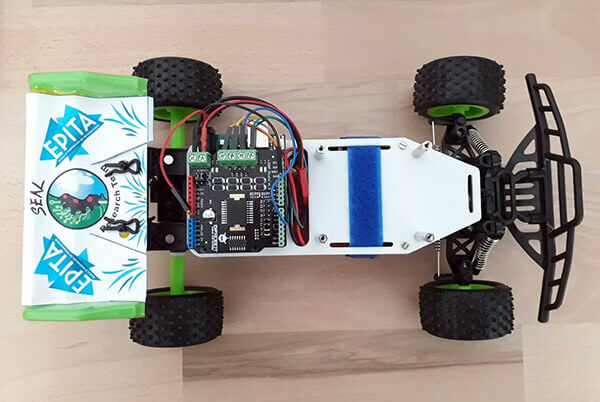
Le kit donné aux étudiants et ce qu’ils doivent obtenir après asssemblage
Cette voiture est en fait un rover 😄 qui a été envoyé sur une planète lointaine. Comme le délai de communication est grand 📡, on ne va pas la piloter 🎮, mais on va plutôt lui envoyer un plan de route 📍.
Le satellite 🛰 (comment ça, le drone 🤨?) qui est en orbite autour de la planète a capturé des images de la zone à explorer (la cours de l’école ^^), ce qui permet de déterminer le chemin à prendre (plots jaune et rouge) 🗺.
Grâce aux compétences apprises pendant le cours, les élèves ont pu relever les distances 🧐📏 sur cette photo satellite et modéliser la trajectoire 💻 que doit suivre leur rover le jour J, c’est-à-dire aujourd’hui 😱!
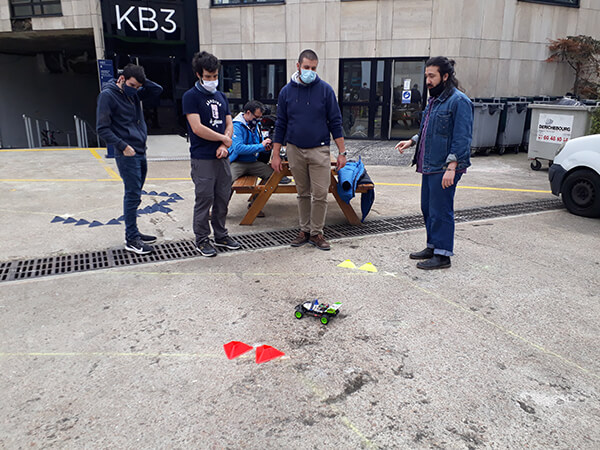


C’est parti !!! Des ambiances d’évaluation comme on les aime 😜!


😲 Certains groupes ont même customisé leur voiture 😆👍 et Mabouya était aussi de la partie 😏 (en version light)
La voiture se déplace à l’aveugle 🙈, c’est-à-dire sans retour de son environnement (absence de capteurs). L’approche la plus efficace dans ce cas pour maîtriser la voiture et de programmer le modèle mathématique de la trajectoire et y intégrer les variables ⚖️ propres à la voiture utilisée (parmi d’autres, on peut utiliser le modèle d’Ackermann). On peut citer par exemple le rayon de braquage, la taille de la voiture, la vitesse atteinte en fonction de la tension des piles et des ordres envoyés, ainsi que les éventuels biais mécaniques.
Après le prochain cours (VOIR, Vision par ordinateur), on rajoutera une caméra. On pourra ainsi réutiliser le modèle de trajectoire abordé ici, mais cette fois-ci en suivant les ordres tirés de l’analyse temps réel des images de la caméra 👀 plutôt que d’un plan de route pré-défini !!! Rendez-vous dans quelques mois 😁.
