The Mermaid Underwater Dataset
Publication en ligne de notre jeu de données “Mermaid Underwater Dataset”

Nous sommes fiers 🎉 🎊 d’annoncer la publication 🗄️ de notre jeu de données sous-marines intitulé The Mermaid Underwater Dataset sur la plateforme SEANOE. SEANOE (SEA scieNtific Open data Edition) est un référentiel de données scientifiques ouvertes dans le domaine des sciences marines financé par l’Ifremer et exploité par le centre de données marines SISMER dans le cadre du Pôle Océan ODATIS.
Les données de ce dataset ont été récoltées lors de l’édition 2022 du Submeeting à Saint-Raphaël sur le site de la Sirène au Lion-de-Mer.
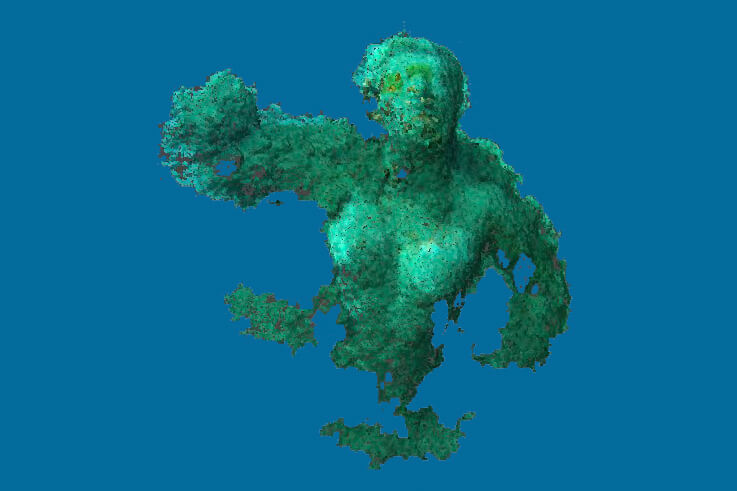
De type image 📸, elles couvrent une zone d’environ 150 m2 qui contient la statue de la Sirène, un fond de sable avec des fragments de tuiles romaines datant du 1er siècle (issues d’un naufrage, l’épave en bois a disparue), et un bloc rocheux. La vie marine 🌱🐟 est répartie dans ces différents espaces. La profondeur moyenne de la zone est de 18.7 mètres.
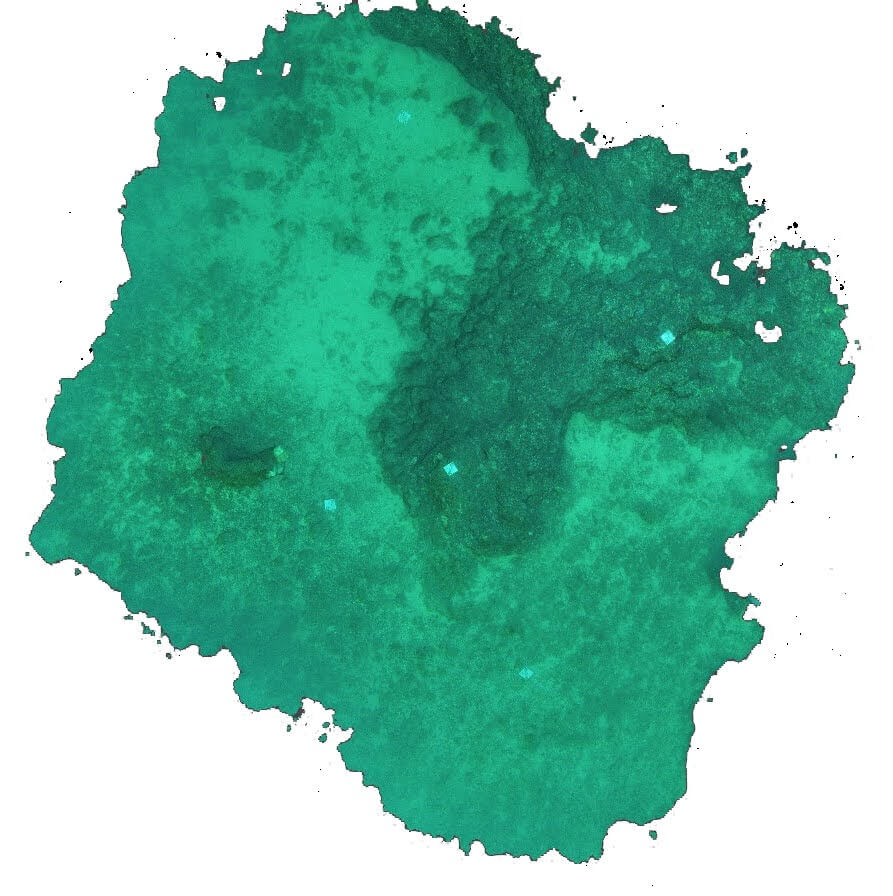
Vue du dessus de la reconstruction 3D de la zone réalisée à partir des données du dataset
📈 Le dataset contient 1250 images RGB (~15 Go) prises par une unique caméra en éclairage naturel. Les images font 3840 x 2800 px et la taille de l’échantillon au sol (GSD - Ground Sample Distance) va de 0.5 mm à 4 mm.
Les images sont accompagnés 📊 des données de véritée terrain (réseau micro-géodésique de 65 m2 avec 5 GCPs - Ground Control Points), des données de calibration, des poses des caméras ainsi que des informations sur la trajectoire.
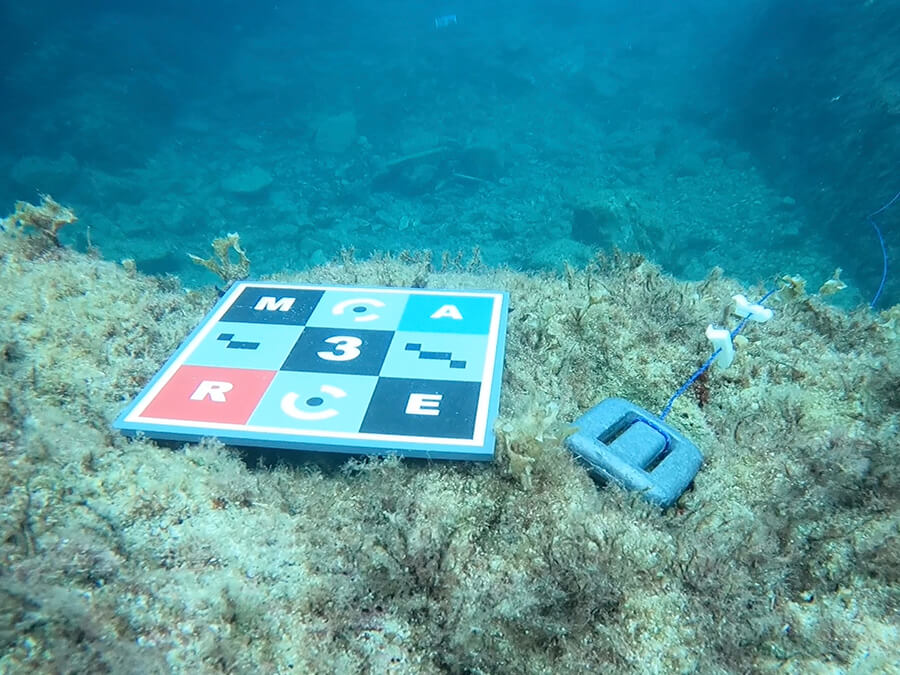
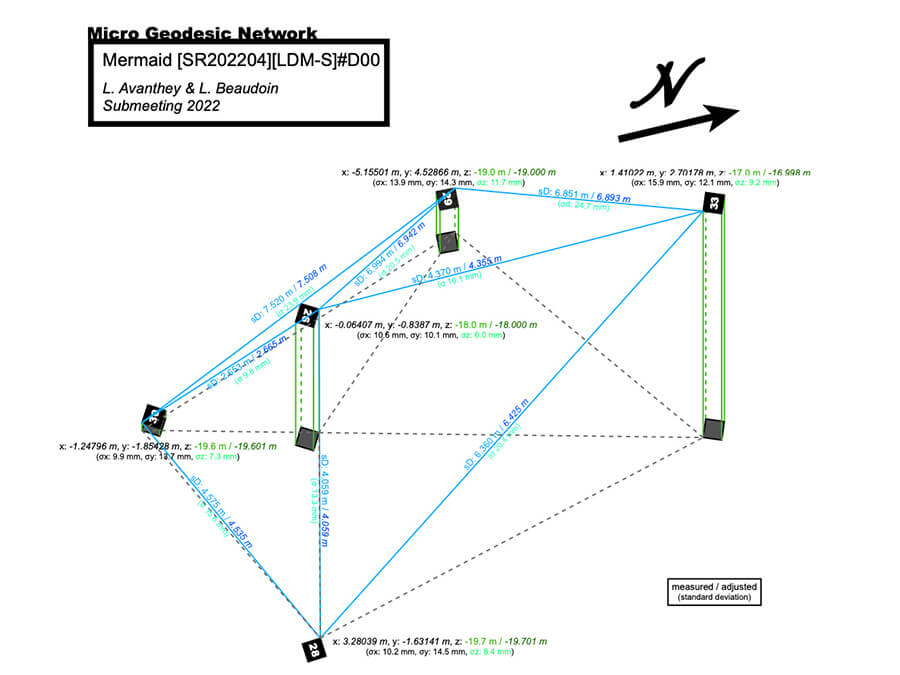
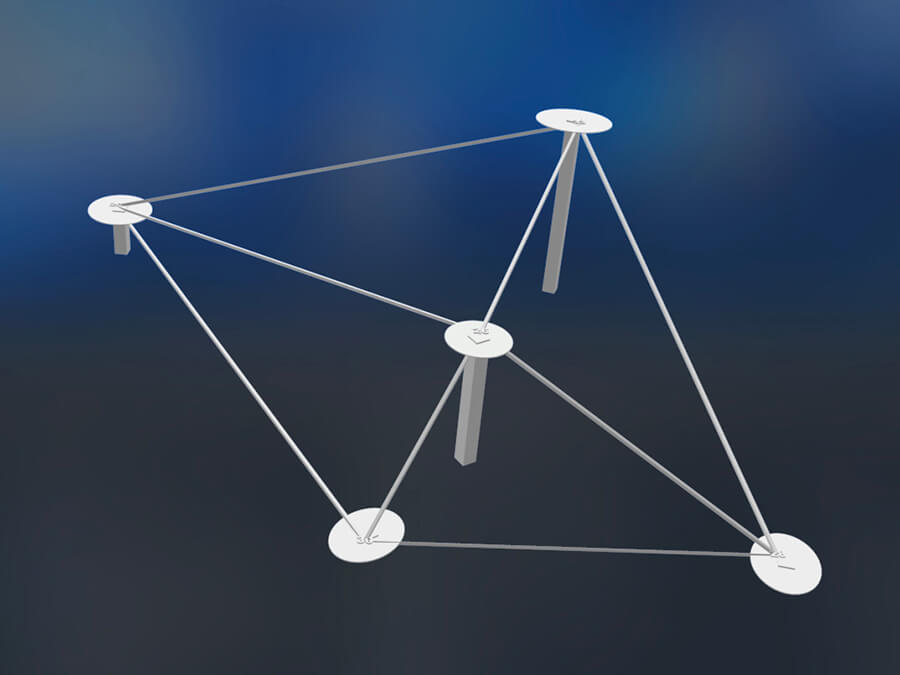
À gauche, les mires 🎯 utilisées en GCPs non intrusifs, au centre les métriques 📏 du réseau micro-géodésique, à droite la représentation 3D à l’échelle du réseau
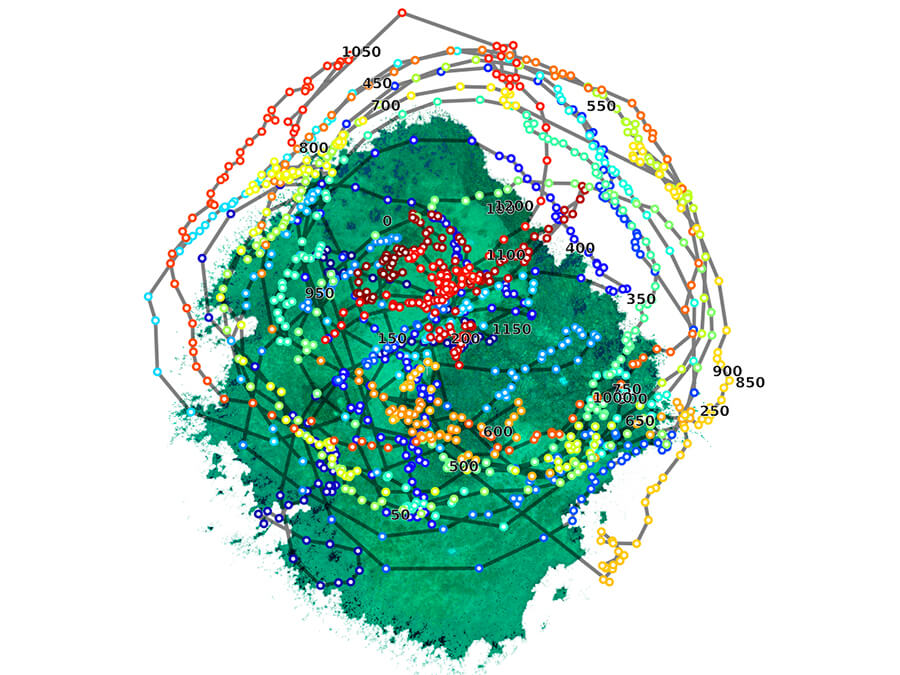
Trajectoire (poses successives des caméras) des images du dataset
Ce dataset peut, entre autres, être utilisé dans le cadre de travaux 🕸 sur la photogrammétrie, la reconstruction 3D, le SLAM Visuel sous-marin, les méthodes SFM ou MVS, l’appariement de points caractéristiques (keypoint / features matching), la triangulation, l’estimation de pose à 6 degrés de liberté (6DOF pose), la re-localisation, la détection de fermetures de boucle (loops closure), les trajectoires, l’optimisation, le nettoyage de données, la correction de couleur, la détection d’objets, etc.
