
Semaine d'intégration SEAL
Semaine d’intégration des nouveaux étudiants SEAL
Pendant toute la semaine, nous avons accueillis 🤗 les nouveaux étudiants pour les former et les faire monter en compétences. Il a fallu faire avec un emploi du temps 🗓 un peu chargé cette année car en raison du couvre-feu, une partie des évaluations prévues dans les semaines précédentes ont glissé ➿ jusque là.
On a démarré par la formation Arduino qui s’est déroulée en distanciel, avec notre kit 🧰 et le skillbook 📘 associé.
Cette formation permet d’appréhender, entre autres, les entrées/sorties d’un micro-contrôleur, leurs types, la gestion de l’alimentation, l’utilisation de LEDs, de résistances fixes et variables, de boutons poussoirs ou interrupteurs et de servo-moteurs.
Puis nous avons lancé l’atelier Ardupilot Flash Car, en présentiel.
L’objectif était dans un premier temps de monter la carte mère utilisée par tous nos robots recherche sur la plateforme pédagogique roulante 🚙, de réaliser tous les branchements 🔌 des moteurs et de l’alimentation correctement puis de paramétrer et flasher notre version d’Ardupilot sur l’ESP32. Enfin, il fallait prendre le contrôle de la voiture via QGroundControl installé sur téléphone et la piloter 🎮 dans le lab et les couloirs alentours.
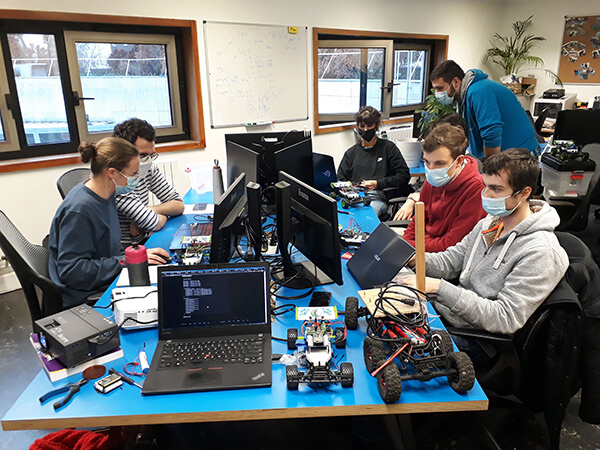
Atelier Ardupilot Flash Car : ça branche, ça compile, ça flash et ça roule ! Enfin, ça, c’est la théorie… 😇
Sur le second jour, on s’est attaqué aux Raspberry Pi via la formation Headless Pi en distanciel avec kit 🧰 et skillbook 📘, suivi de la mise en pratique en conditions via le Pi Ground Challenge.
L’idée est d’apprendre à utiliser les Pi sans le confort du labo : nous n’avons pas toujours d’écran 🖥, de souris 🖱 et de clavier ⌨️ à portée de main, encore moins de WiFi 📶. Il faut donc être capable de travailler avec juste le PC portable et la Pi pour pouvoir installer l’image, la configurer, lancer les actions et vérifier qu’elles se sont bien déroulées. Après l’entrainement du matin, le tout est mis en pratique en milieu extérieur 🌲🌳.
La mission était d’acquérir 📸 des jeux d’images 🏞 pour l’auto-calibration d’une piCam.


Entrainement au chaud, puis mise en pratique terrain. Mais non, il ne fait pas froid 🥶, c’est dans la tête 😜 (on avait prévenu de bien se couvrir 😙).
Le troisième jour, on lance la formation ROS, qui s’est déroulée en distanciel et en trois parties jusqu’à la fin de la semaine.
ROS est un interlogiciel qui permet d’architecturer le code de l’unité haut-niveau de manière fiable et robuste : chaque méta-tâche est lancée de manière autonome sous la forme d’un noeud, la communication entre noeuds est native et un noeud maître orchestre l’ensemble 🌐 et relance les noeuds qui ont crashés sans que cela n’impacte le fonctionnement des autres (ROS 1).
On a enchaîné l’après-midi sur un atelier d’intelligence coopérative sur l’état de l’art scientifique 🎓.
Cet atelier avait un double objectif : d’une part mieux comprendre à quoi sert un état de l’art et comment s’y prendre pour le réaliser 📚📑 et d’autre part découvrir des outils de design thinking permettant un travail en groupe efficace.
Le quatrième jour, on passe sur l’atelier Ardupilot Explore.
Cette fois-ci on est sur le robot roulant 🚙 utilisé en recherche, Mabouya 🦎, qui est équipé d’un GPS 📍. L’objectif était de familiariser les étudiants avec l’utilisation et l’opération des robots du labo : checks, branchements & démarrage, utilisation de QGroundControl pour planifier les trajectoires à réaliser, procédures d’arrêt d’urgence, …


Prise en main de la bête 🦎🤨: on se rassure, elle ne mort pas (trop) 😇
Le scénario du challenge : on est sur une base martienne, le robot est un rover et une première équipe a découvert par satellite 🛰 une zone d’intérêt pour prélever des échantillons, mais on ne dispose pas d’assez de détails pour définir un parcours pour s’y rendre avec le rover.
À l’aide des images satellites, on a pu identifier 🗺 4 passages possiblement praticables. Cependant, on ne sait pas s’ils permettront d’arriver à la zone cible. On établit donc des checkpoints à mi-parcours et chaque équipe essaye d’y envoyer le robot (euh… le rover) pour obtenir des informations sur la suite du chemin. Le rover ramène ensuite ces données à la base et la carte est complétée 🧩.
Le terrain connu est matérialisé par des plots jaunes 🔸 pour les checkpoints 📍 et rouges 🔻 pour les rochers ⛰ qui bloquent le chemin.
Les données sont partagées entre les équipes et chacune d’entre-elles peut programmer de nouvelles trajectoires en prenant en compte les observations déjà réalisées. Les essais s’enchainent jusqu’à trouver 🧭 un chemin praticable qui mène à la zone cible 🎯 (pratiquer c’est répéter plusieurs fois une action jusqu’à ce qu’elle passe en routine 😋).

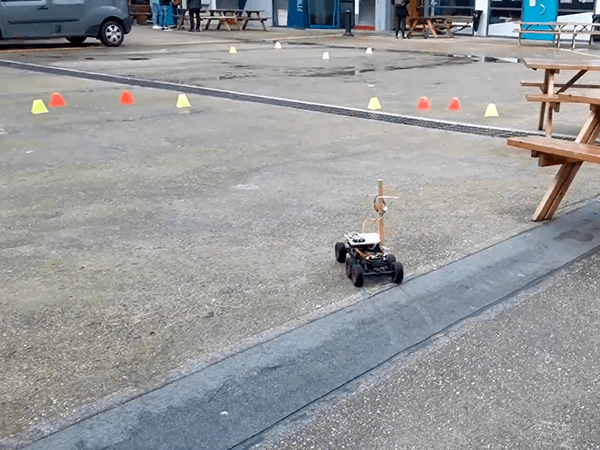
Élaboration des trajectoires, et c’est parti pour l’aventure 🤠: explorons cette zone mystérieuse et inconnue ! Les plots ♟ matérialisent les repères géologiques découverts.
Cinquième jour : pour clore la semaine, on termine sur un serious game sur la démarche scientifique
C’est le tout nouveau serious game que nous avons développé depuis le Haggle Robotique. Tellement nouveau que la conception n’est pas terminée : nous n’avons pas pu faire un test complet au préalable et la quantification (temps, quantité des éléments, etc.) n’est pas réglée. Les étudiants ont donc pu, tout en y participant, découvrir l’envers du décors et voir comment se passe la création d’un jeu (naan, on ne les a pas utilisés en cobayes 👩🔬😙).
Ce serious game est inspiré du jeu Éleusis+Nobel.
L’objectif est de leur faire découvrir les mécanismes et leviers de la démarche scientifique (♻️ observations - hypothèses - tests ♻️) ainsi que la manière dont fonctionne le monde scientifique (🎙 partages & communautés, 💰 financements, etc.).

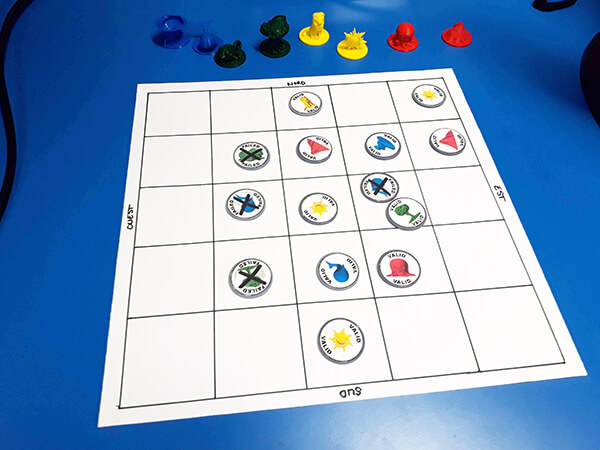

Les labos, un plateau d’expérimentations et les participants en pleine conférence annuelle
Et hop, ça y est, c’est terminé 😢. Voilà nos étudiants intégrés 🥳👍 et surtout mieux armés 🛡🛠🧢 pour attaquer les challenges dont le premier round démarre dès la semaine prochaine 😜: c’est parti ! Welcome to SEAL Research Team 😁🤝!
⇦ Revoir la composition de l’équipe étudiante SEAL 2021
