
Déplacements Lyon / Montpellier
Déplacements à Lyon et Montpellier
C’est la semaine de la recherche à l’EPITA. À cette occasion, les équipes présentent leur travaux aux étudiants en fin du cycle préparatoire. En plus de la présentation sur le site de Paris, chaque équipe se déplace physiquement dans l’un des sites préparatoires en région : pour l’équipe SEAL, le rendez-vous est fixé à Lyon !
SEAL@Lyon 😊
L’objectif est de donner de la perspective aux étudiants par rapport aux technologies et aux disciplines scientifiques qu’ils abordent à l’école et pourquoi pas de créer des vocations pour la recherche.
On profite du déplacement pour faire un crochet par Montpellier et rencontrer nos collègues du LIRMM, des équipes EXPLORE et ICAR, afin de discuter des projets de recherche en cours sur l’étude des poissons, de nos étudiants qu’on leur envoie en stage et de projets possibles à monter ensemble.
Le Laboratoire d’Informatique, de Robotique et de Microélectronique de Montpellier (LIRMM) héberge un pôle de robotique sous-marine important.
En marge de ces réunions, on organise une campagne d’acquisition avec notre nouvelle charge utile pour observer si le taux de synchronisation que nous avons réussi à obtenir est suffisant pour figer le dynamisme du milieu sous-marin ce qui permettra de reconstruire en 3D les éléments en mouvement.
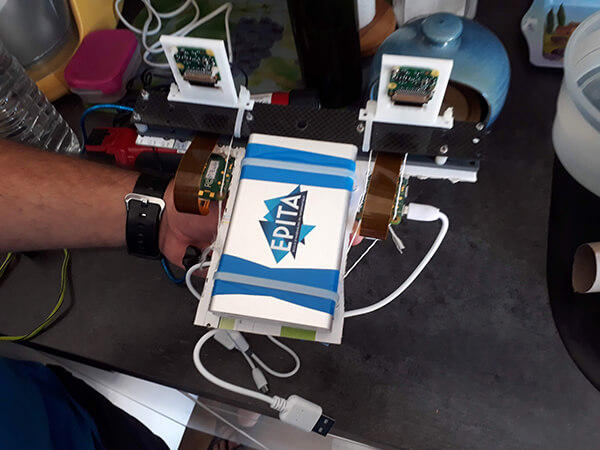

Montage temporaire du banc (les racks ne sont pas encore terminés) et prises de vues
La mer est un peu agitée et il n’est pas garanti que l’on trouve les sujets dynamiques adaptés à nos tests, alors on opte pour des prises de vues au Seaquarium du Grau du Roi : anémones et poissons de tailles multiples nous offrent un bon pannel de mouvements à portée de main.


Un bureau un peu particulier 🙃
Petite mention spéciale pour le petit poisson vache (Lactoria cornuta) du Seaquarium, très curieux et très intrigué par notre montage 🐠!
On se rend également sur un de nos autres lieux de mission dans la région pour tester, cette fois-ci, la qualité des prises de vues en présence d’un éclairage artificiel pour analyser les améliorations à apporter aux paramètres de prises de vues pour être capable de reconstruire en 3D des grottes.
Les problématiques de ce type d’environnement sont proches de celles de nos travaux sous-marins, car il n’y a pas d’accès au signal GPS et l’éclairage est altéré.


Acquisition d’images dans l’optique de pouvoir cartographier en 3D ces boyaux émergés ou immergés
Pour terminer ces trois jours bien remplis, on effectue un repérage sur un site de la région pour une future campagne d’acquisition, aérienne cette fois-ci. Il s’agit d’une ruine d’un ancien château.

Future zone de mission
